(12)電動昇降椅子を声で操作(工作編) [介護]
手足の動かせない身体障害者にとって、毎日長時間過ごす電動昇降椅子の音声操作は何としても実現したい課題でした。ようやく実用化レベルに達し、その実際の動作を前回ブログで紹介しました。今回は開発に要した3ヶ月の取り組みと具体的設計に関わる情報を紹介します。
声で昇降レバーを動かす機能を開発するにあたり、満たすべき仕様は次の通りとしました。
1)電動昇降椅子はレンタルなので、簡単に原状回復ができること。
2)声で操作できればベスト。それがダメでもパソコンから操作できること。
3)手動でも操作可能なこと。
4)妻が実作業できるレベルの工作であること。
今回用いた電動昇降椅子はコムラ製作所、『くるり』、品番:DSKRです。
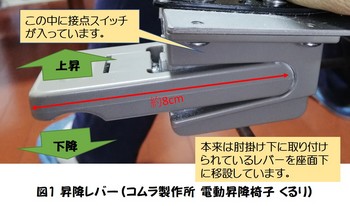
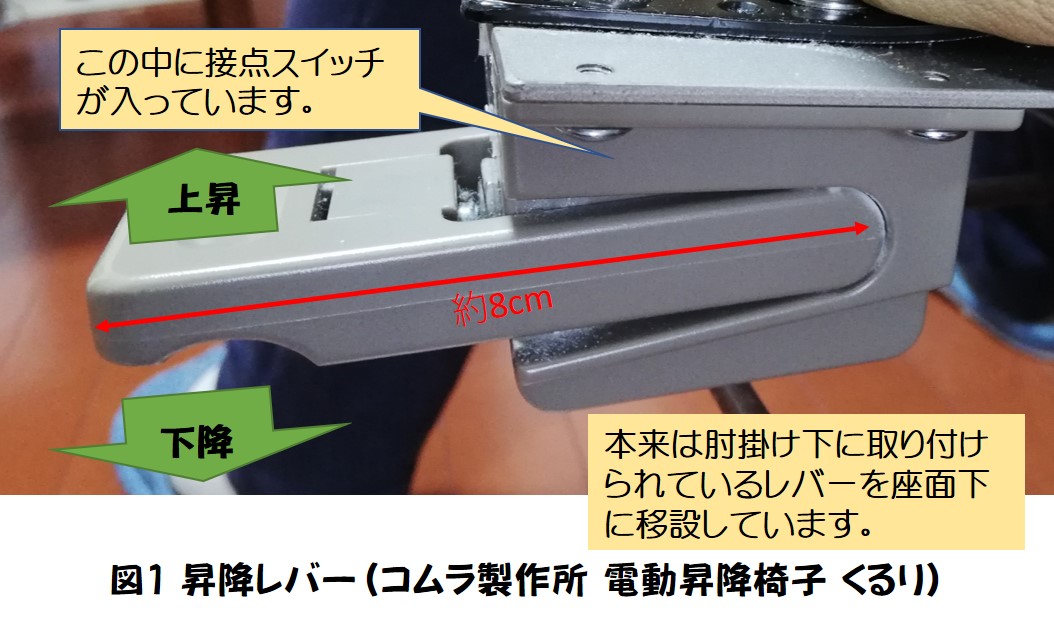
図1にレバー部の写真を示します。右端を固定端とするレバーは、上に引き上げると座面は上昇し、下に押し下げると座面は下降します。レバーは単なる接点スイッチを押しているだけで、引き上げや押し下げの程度によって昇降速度が変わることはありません。レバーは角度で±7度、レバー端では約±1cmの変位量です。レバー長さは固定端から先端まで約8cmです。
これまでも使っているSwitchBot(物理的にスイッチを押す装置)をレバーの上下動作に直接適用できればよいのですが、充分な変位量を取れないこと、更にSwitchBotは動作時間を1条件しか設定できないこと、スイッチを押す力が未確認ながらも強くなさそうなことから断念しました。SwitchBotを使うなら、何かボタンを押して昇降を切り替える方式しかなさそうです。
そこで次に考えたのが、サーボモーターで昇降レバーを直接動かすことです。サーボモーターはロボットの間接に使用されるもので、回転角を指定して動作させることが可能です。角度を指定して動かすならステッピングモーターという選択肢もあるのですが、ロボットに使われているサーボモーターは制御も簡単そうで、制御プログラムも多数のサイトで紹介されていることから何とかなりそうに思ったのです。
とはいえ、これまでサーボモーターを使った工作はしたこともなく、先ずは基本情報を得るために本を買ってみることから始めました。色々と電子工作の本を調べてみると、サーボモーターの制御はArduino(アルディーノ)と呼ばれるマイコン基板を使ったものが簡単そうであることが判りました。そこで買ったのが次の本です。当然、電子書籍(Kindle)で購入しました。マイコン基板による電子工作では他にもRaspberry Pi(通称ラズパイ)などがあります。こちらでもArduinoと同様のことは実現可能ですが、直感的にArduinoの方が簡単そうに見えました。

この本でArduinoの基本事項を勉強しました。最低限必要な知識を得るのはこれで何とかなります。あとはネットで調べることにしました。
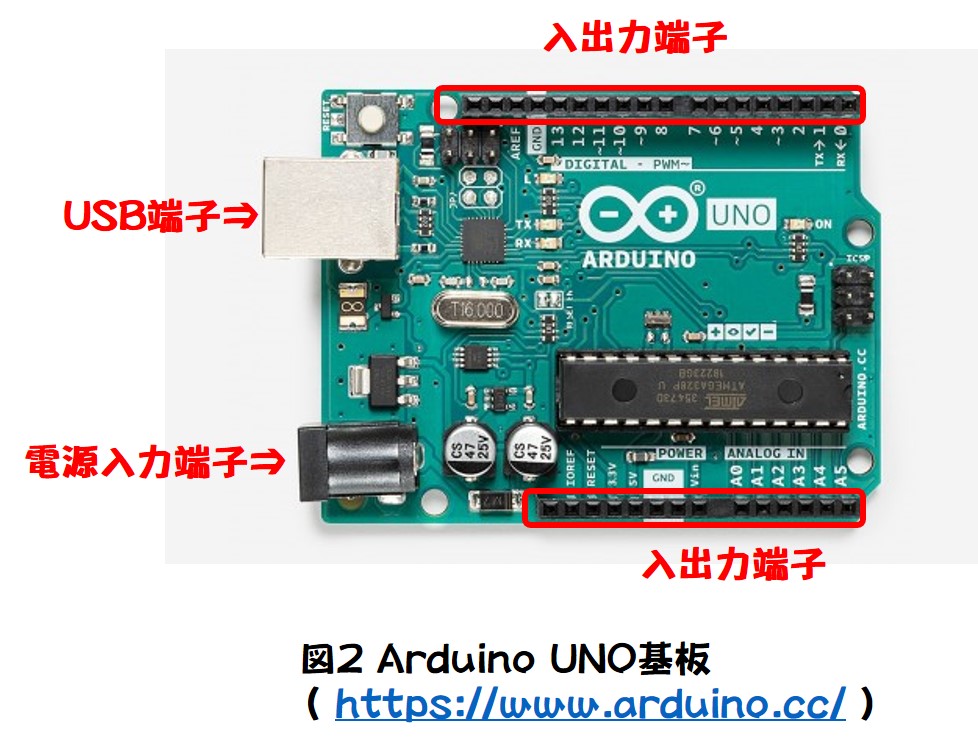
Arduinoはマイコン基板、つまりマイクロコンピューターを搭載した電子工作用の基板です。Arduino基板にも色々種類があるようですが、最も一般的なArduino UNOという種類の基板写真を図2に示します。

基板周囲に多くの端子が配置され、電気信号(電圧、電流)を入力したり出力したりして機器の制御を行います。その電気信号の入出力、処理をプログラムによって自由自在に組むことが可能なので、様々な機器に対応することができるのです。プログラム作成はフリーで提供されているArduino IDEを用いてパソコン上で行います。尚、Arduinoではプログラムのことをスケッチと呼ぶようです。スケッチはUSBケーブルで接続されたパソコンからArduino UNO基板に転送することで実行されます。今回はサーボモーターの制御スケッチを作成し、使用するArduino基板に転送することになります。
ちょっと知識がつくと、机上の勉強だけでなく実際のモノを触ってみたくなります。それで色々調べていると次のようなキットをAmazonで見つけました。Arduinoは互換性のあるものが多数販売されています。このキットもその1つです。
![ELEGOO Arduino用UNO R3スターターキット レベルアップ チュートリアル付 mega2560 r3 nanoと互換 [並行輸入品]](https://m.media-amazon.com/images/I/61S+fEvTvML._SL160_.jpg "ELEGOO Arduino用UNO R3スターターキット レベルアップ チュートリアル付 mega2560 r3 nanoと互換 [並行輸入品]")
ELEGOO Arduino用UNO R3スターターキット レベルアップ チュートリアル付 mega2560 r3 nanoと互換 [並行輸入品]
¥3,899
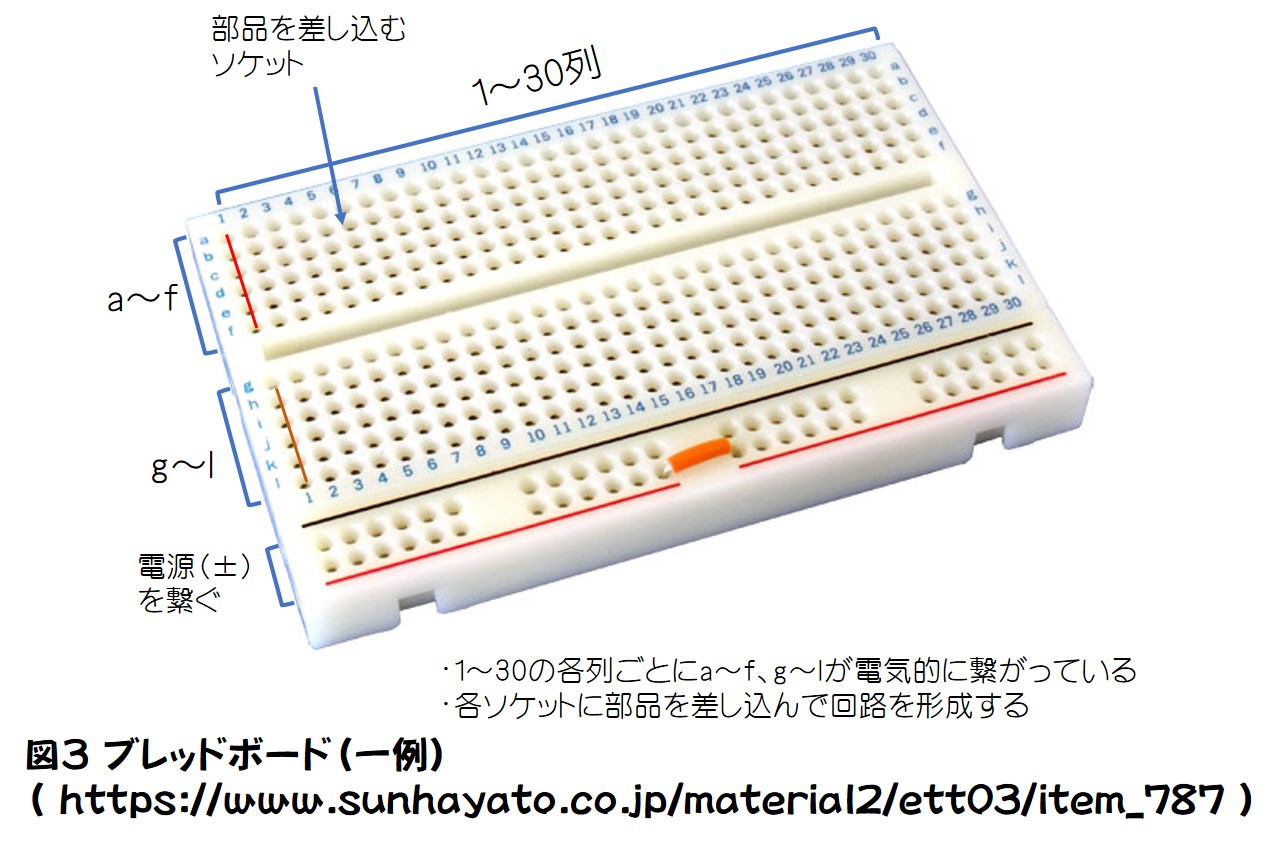
これはArduinoの学習キットで、実際のArduino基板や各種モーター、制御装置に必要なもの一式が入ってこの値段です。個別に揃えるより格段に安く、レッスンテキストがあり、例題、サンプルプログラムが付属しています。対象は小学生高学年以上だそうです。このキットでは回路を組むのにブレッドボードを使うので半田付け作業は不要です。ブレッドボードとは図3に示すもので、電子工作にはよく使われます。
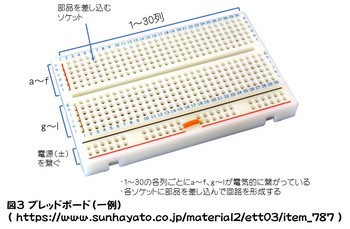
表面の穴に部品、配線を差し込むだけで電子回路を組むことが可能です。これならブロックを組立てる感覚なので、妻にも出来そうです。仕様4)をクリアです。詳しくは、ブレッドボードの使い方|エレクトロニクス分野をサポートする製造メーカー サンハヤト株式会社 (sunhayato.co.jp)を参照ください。
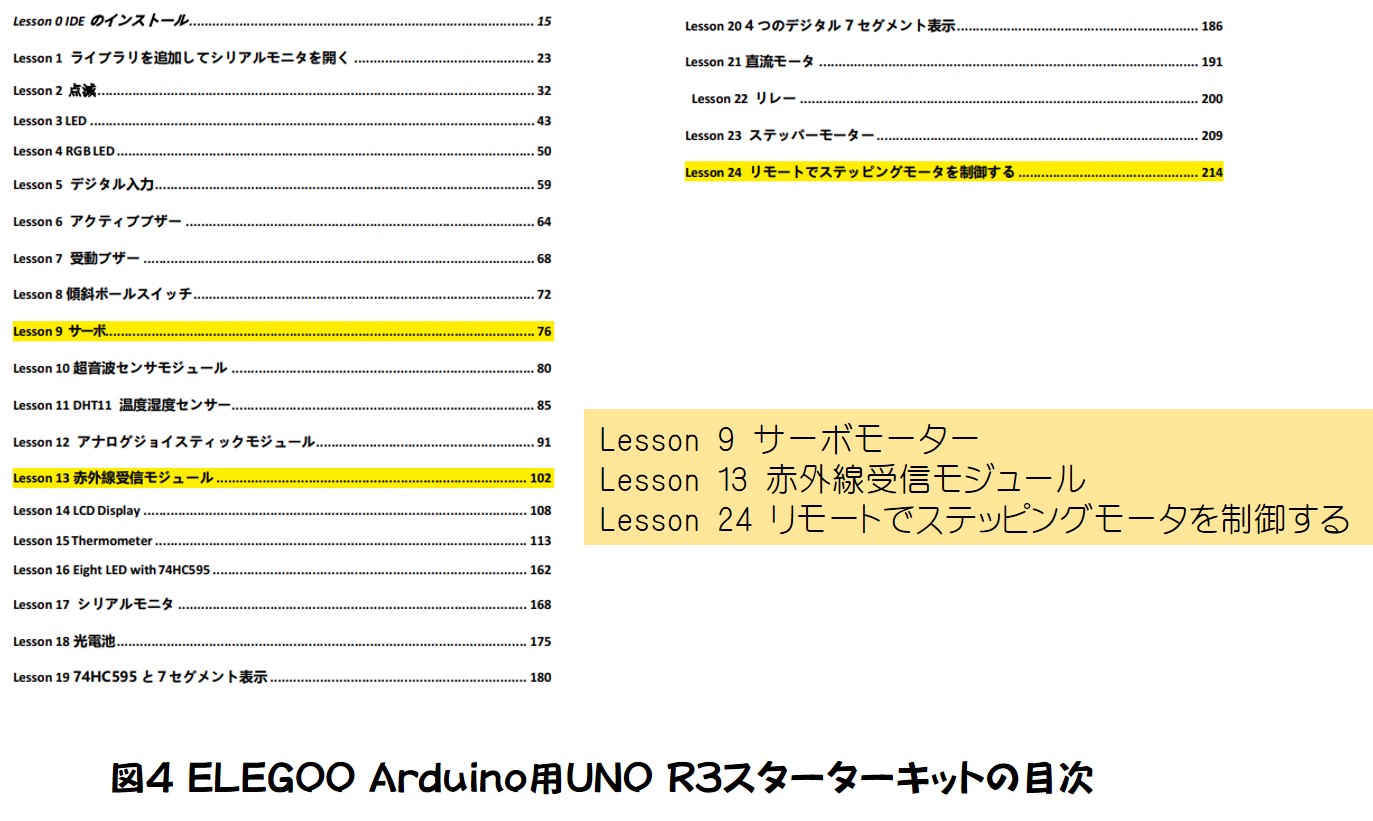
次に、このレッスンテキストの目次を図4に示します。目次を見てビックリ。
Lesson24に「リモートでステッピングモーターを制御する」とあるではないですか。
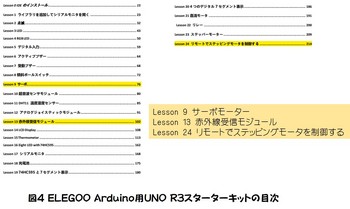
中を見てみると、付属の赤外線センサー、リモコンを用いてステッピングモーターの回転を制御するというものでした。このステッピングモーターをサーボモーターに置き換えればSwitchBotを使わなくても目的とするものが実現できそうです。とりあえずLesson9、13から取り組めばよさそうです。他にも役立ちそうな項目が沢山ありますが、今回は後回しにします。
このキットでサーボモーターをどのように動かすかを知ることができました。サーボモーターには電源の(+)、(-)、パルス入力の3つの端子があります。パルス入力端子にはサーボモーターが所望の動作になるパルス信号をArduino基板で発生させて入力します。電源は使用するサーボモーターに応じて決める必要があります。電流がArduino基板端子の許容電流(40mA)より大きい場合は、Arduino基板からは供給できないため外部電源を用意しなければなりません。
ここまでくると、具体的なイメージができてきました。これから取り組むべき課題は次のソフト、ハードの二つです。
(1)サーボモーターをレバーに取り付け、Arduino基板と接続
(2)昇降椅子のレバーを上下させるサーボモーター制御スケッチ作成
特に(1)はモーター選定と電源準備、治具設計と発注、必要部品準備などそれなりの作業が必要です。自分でできることはパソコン作業だけなので、その他は妻の協力が必須です。まずはサーボモーターの選定からです。学習キットにもサーボモーターは付属していますが、トルク(回転の強さ)がレバーを動かすのには足りなさそうです。
では、レバー操作にどれくらいのトルクのサーボモーターが必要なのかを見積もってみます。レバー端に必要な力を測定すると0.75~1.0kgであることが判りました。レバーの長さが8cmなので、8kgf•cmのトルクがあればレバーを動かせることになります。そこでいろいろ調べた結果、4.8Vで9.6kgf•cm、6Vで11 kgf•cmのトルクのMG996Rというサーボモーターを選定しました。1個1500円程度で入手可能です。もう少し大きなトルクでも良いのですが、モーターサイズが大きくなったり消費電流も大きくなるのでこの辺が妥当なところだろうと思います。
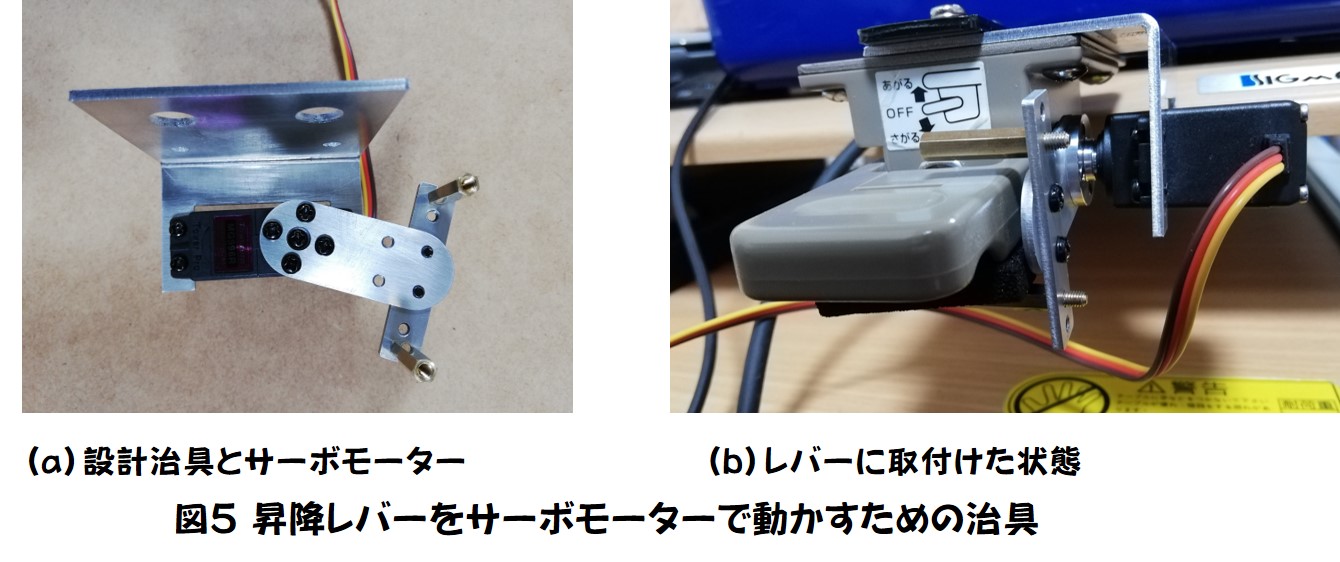
サーボモーターの選定が終われば、次はレバーに取り付けるための治具設計です。仕様1)を満たすために、取り付けは既存のネジを利用します。図1に見える2つのネジが丁度よさそうです。さらに、手動でも操作可能にするために、元々のレバー可動範囲を確保しつつ、サーボモーターでレバーを動かす構造にすると仕様3)を満たせます。後は必要箇所の寸法実測、図面作成です。治具は強度も必要なことから、アクリルではなくアルミニウムで作製することにしました。アルミニウムの加工は、ネットで見つけた業者に図面をメールで送付すればOKです。今回は複数の業者へ見積りをお願いしたのですが、1社からは断られました。当方の指定精度で加工できないのが理由でした。そんなに厳しい寸法精度を要求したつもりはないのですが、業者によって保有するレーザー加工機の精度が異なるようです。
図5にサーボモーターを取り付けた治具と、それをレバーに取り付けた写真を示します。
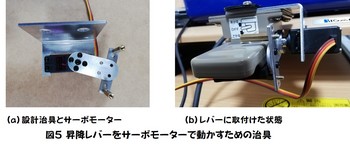
レバーの昇降は、スペーサーと呼ばれる棒状の部品を引掛けて行っています。このスペーサーをどの程度動かすかはサーボモーターの回転角度に依存するので、スケッチで決めることになります。ここまで出来ればもう大した工作もなく、完成したも同然です。
ようやく目途はついたのですが、完成までの全てを1回で紹介するのは困難です。今回はここまでとして、次回以降にブレッドボードの配線、赤外線センサー、スマートスピーカーを活用した音声操作などについて紹介出来ればと思います。
できるだけ平易に記述するように心掛けましたが、電子工作の経験の無い方には目新しい用語が多くなってしまったかもしれません。しかし、今回紹介した内容は決して難しいものではありません。もし、始めようという方がおられるのなら、学習キットからされることをお勧めします。
お問合せ等はこちら
![[コムラ製作所]独立宣言くるり DSKR](https://thumbnail.image.rakuten.co.jp/@0_mall/sanai-kaigo/cabinet/item-3/dskr_1.jpg?_ex=128x128 "[コムラ製作所]独立宣言くるり DSKR")
<公開中ブログ リスト>
文字をクリックすればそのブログに移動します。
(1)好きな時に声で寝返りを打つことができます
(2)好きな時に声で寝返りを打つことができます②
(3)トイレでのスマートスピーカー活用
(4)玄関ドアを声で解錠
(5)褥瘡を抑えるクッションはどれだ?
(6)完全ハンズフリーで電話を使う
(7)緊急時の備えにスマート機器を活用
(8)パソコンの視線入力を試してみた
(9)スマート機器に関する基礎知識
(10)Tobii EyeTracker 5が使えなくなった!
(11)電動昇降椅子を声で操作
(12)電動昇降椅子を声で操作(工作編)
(13)エアウィーヴ 車いすクッションを使ってみた
(14)被介助者のストレス
(15)増えすぎたスマート機器とWiFi接続
(16) Eye Tracker 4C を使った視線入力
(17)ノープレッシャークッションⅡを試してみた
(18)移乗機
(19)クッションに代わる痛み低減装置
(20)スマホ機種変更のリスク
(21)声でキーボード操作
(22)ALS患者が胃カメラ飲んできた。
(23)ALS患者が外出して参議院選挙に行ってきた。
(24)座位保持が困難でもトイレ介助は一人で大丈夫!
(25)巻き爪対策製品を試してみた!
(26)スマートスピーカーを入院生活に活用 ~ナースコールを声で押す~
声で昇降レバーを動かす機能を開発するにあたり、満たすべき仕様は次の通りとしました。
1)電動昇降椅子はレンタルなので、簡単に原状回復ができること。
2)声で操作できればベスト。それがダメでもパソコンから操作できること。
3)手動でも操作可能なこと。
4)妻が実作業できるレベルの工作であること。
今回用いた電動昇降椅子はコムラ製作所、『くるり』、品番:DSKRです。
図1にレバー部の写真を示します。右端を固定端とするレバーは、上に引き上げると座面は上昇し、下に押し下げると座面は下降します。レバーは単なる接点スイッチを押しているだけで、引き上げや押し下げの程度によって昇降速度が変わることはありません。レバーは角度で±7度、レバー端では約±1cmの変位量です。レバー長さは固定端から先端まで約8cmです。
これまでも使っているSwitchBot(物理的にスイッチを押す装置)をレバーの上下動作に直接適用できればよいのですが、充分な変位量を取れないこと、更にSwitchBotは動作時間を1条件しか設定できないこと、スイッチを押す力が未確認ながらも強くなさそうなことから断念しました。SwitchBotを使うなら、何かボタンを押して昇降を切り替える方式しかなさそうです。
そこで次に考えたのが、サーボモーターで昇降レバーを直接動かすことです。サーボモーターはロボットの間接に使用されるもので、回転角を指定して動作させることが可能です。角度を指定して動かすならステッピングモーターという選択肢もあるのですが、ロボットに使われているサーボモーターは制御も簡単そうで、制御プログラムも多数のサイトで紹介されていることから何とかなりそうに思ったのです。
とはいえ、これまでサーボモーターを使った工作はしたこともなく、先ずは基本情報を得るために本を買ってみることから始めました。色々と電子工作の本を調べてみると、サーボモーターの制御はArduino(アルディーノ)と呼ばれるマイコン基板を使ったものが簡単そうであることが判りました。そこで買ったのが次の本です。当然、電子書籍(Kindle)で購入しました。マイコン基板による電子工作では他にもRaspberry Pi(通称ラズパイ)などがあります。こちらでもArduinoと同様のことは実現可能ですが、直感的にArduinoの方が簡単そうに見えました。
これ1冊でできる! Arduinoではじめる電子工作 超入門 改訂第4版
- 作者: 福田和宏
- 出版社/メーカー: ソーテック社
- 発売日: 2020/05/07
- メディア: 単行本
この本でArduinoの基本事項を勉強しました。最低限必要な知識を得るのはこれで何とかなります。あとはネットで調べることにしました。
Arduinoはマイコン基板、つまりマイクロコンピューターを搭載した電子工作用の基板です。Arduino基板にも色々種類があるようですが、最も一般的なArduino UNOという種類の基板写真を図2に示します。
基板周囲に多くの端子が配置され、電気信号(電圧、電流)を入力したり出力したりして機器の制御を行います。その電気信号の入出力、処理をプログラムによって自由自在に組むことが可能なので、様々な機器に対応することができるのです。プログラム作成はフリーで提供されているArduino IDEを用いてパソコン上で行います。尚、Arduinoではプログラムのことをスケッチと呼ぶようです。スケッチはUSBケーブルで接続されたパソコンからArduino UNO基板に転送することで実行されます。今回はサーボモーターの制御スケッチを作成し、使用するArduino基板に転送することになります。
ちょっと知識がつくと、机上の勉強だけでなく実際のモノを触ってみたくなります。それで色々調べていると次のようなキットをAmazonで見つけました。Arduinoは互換性のあるものが多数販売されています。このキットもその1つです。
ELEGOO Arduino用UNO R3スターターキット レベルアップ チュートリアル付 mega2560 r3 nanoと互換 [並行輸入品]
- 出版社/メーカー: ELEGOO
- メディア:
ELEGOO Arduino用UNO R3スターターキット レベルアップ チュートリアル付 mega2560 r3 nanoと互換 [並行輸入品]
¥3,899
これはArduinoの学習キットで、実際のArduino基板や各種モーター、制御装置に必要なもの一式が入ってこの値段です。個別に揃えるより格段に安く、レッスンテキストがあり、例題、サンプルプログラムが付属しています。対象は小学生高学年以上だそうです。このキットでは回路を組むのにブレッドボードを使うので半田付け作業は不要です。ブレッドボードとは図3に示すもので、電子工作にはよく使われます。
表面の穴に部品、配線を差し込むだけで電子回路を組むことが可能です。これならブロックを組立てる感覚なので、妻にも出来そうです。仕様4)をクリアです。詳しくは、ブレッドボードの使い方|エレクトロニクス分野をサポートする製造メーカー サンハヤト株式会社 (sunhayato.co.jp)を参照ください。
次に、このレッスンテキストの目次を図4に示します。目次を見てビックリ。
Lesson24に「リモートでステッピングモーターを制御する」とあるではないですか。
中を見てみると、付属の赤外線センサー、リモコンを用いてステッピングモーターの回転を制御するというものでした。このステッピングモーターをサーボモーターに置き換えればSwitchBotを使わなくても目的とするものが実現できそうです。とりあえずLesson9、13から取り組めばよさそうです。他にも役立ちそうな項目が沢山ありますが、今回は後回しにします。
このキットでサーボモーターをどのように動かすかを知ることができました。サーボモーターには電源の(+)、(-)、パルス入力の3つの端子があります。パルス入力端子にはサーボモーターが所望の動作になるパルス信号をArduino基板で発生させて入力します。電源は使用するサーボモーターに応じて決める必要があります。電流がArduino基板端子の許容電流(40mA)より大きい場合は、Arduino基板からは供給できないため外部電源を用意しなければなりません。
ここまでくると、具体的なイメージができてきました。これから取り組むべき課題は次のソフト、ハードの二つです。
(1)サーボモーターをレバーに取り付け、Arduino基板と接続
(2)昇降椅子のレバーを上下させるサーボモーター制御スケッチ作成
特に(1)はモーター選定と電源準備、治具設計と発注、必要部品準備などそれなりの作業が必要です。自分でできることはパソコン作業だけなので、その他は妻の協力が必須です。まずはサーボモーターの選定からです。学習キットにもサーボモーターは付属していますが、トルク(回転の強さ)がレバーを動かすのには足りなさそうです。
では、レバー操作にどれくらいのトルクのサーボモーターが必要なのかを見積もってみます。レバー端に必要な力を測定すると0.75~1.0kgであることが判りました。レバーの長さが8cmなので、8kgf•cmのトルクがあればレバーを動かせることになります。そこでいろいろ調べた結果、4.8Vで9.6kgf•cm、6Vで11 kgf•cmのトルクのMG996Rというサーボモーターを選定しました。1個1500円程度で入手可能です。もう少し大きなトルクでも良いのですが、モーターサイズが大きくなったり消費電流も大きくなるのでこの辺が妥当なところだろうと思います。
サーボモーターの選定が終われば、次はレバーに取り付けるための治具設計です。仕様1)を満たすために、取り付けは既存のネジを利用します。図1に見える2つのネジが丁度よさそうです。さらに、手動でも操作可能にするために、元々のレバー可動範囲を確保しつつ、サーボモーターでレバーを動かす構造にすると仕様3)を満たせます。後は必要箇所の寸法実測、図面作成です。治具は強度も必要なことから、アクリルではなくアルミニウムで作製することにしました。アルミニウムの加工は、ネットで見つけた業者に図面をメールで送付すればOKです。今回は複数の業者へ見積りをお願いしたのですが、1社からは断られました。当方の指定精度で加工できないのが理由でした。そんなに厳しい寸法精度を要求したつもりはないのですが、業者によって保有するレーザー加工機の精度が異なるようです。
図5にサーボモーターを取り付けた治具と、それをレバーに取り付けた写真を示します。
レバーの昇降は、スペーサーと呼ばれる棒状の部品を引掛けて行っています。このスペーサーをどの程度動かすかはサーボモーターの回転角度に依存するので、スケッチで決めることになります。ここまで出来ればもう大した工作もなく、完成したも同然です。
ようやく目途はついたのですが、完成までの全てを1回で紹介するのは困難です。今回はここまでとして、次回以降にブレッドボードの配線、赤外線センサー、スマートスピーカーを活用した音声操作などについて紹介出来ればと思います。
できるだけ平易に記述するように心掛けましたが、電子工作の経験の無い方には目新しい用語が多くなってしまったかもしれません。しかし、今回紹介した内容は決して難しいものではありません。もし、始めようという方がおられるのなら、学習キットからされることをお勧めします。
お問合せ等はこちら
- ショップ: 介護shop サンアイ
- 価格: 228,700 円
<公開中ブログ リスト>
文字をクリックすればそのブログに移動します。
(1)好きな時に声で寝返りを打つことができます
(2)好きな時に声で寝返りを打つことができます②
(3)トイレでのスマートスピーカー活用
(4)玄関ドアを声で解錠
(5)褥瘡を抑えるクッションはどれだ?
(6)完全ハンズフリーで電話を使う
(7)緊急時の備えにスマート機器を活用
(8)パソコンの視線入力を試してみた
(9)スマート機器に関する基礎知識
(10)Tobii EyeTracker 5が使えなくなった!
(11)電動昇降椅子を声で操作
(12)電動昇降椅子を声で操作(工作編)
(13)エアウィーヴ 車いすクッションを使ってみた
(14)被介助者のストレス
(15)増えすぎたスマート機器とWiFi接続
(16) Eye Tracker 4C を使った視線入力
(17)ノープレッシャークッションⅡを試してみた
(18)移乗機
(19)クッションに代わる痛み低減装置
(20)スマホ機種変更のリスク
(21)声でキーボード操作
(22)ALS患者が胃カメラ飲んできた。
(23)ALS患者が外出して参議院選挙に行ってきた。
(24)座位保持が困難でもトイレ介助は一人で大丈夫!
(25)巻き爪対策製品を試してみた!
(26)スマートスピーカーを入院生活に活用 ~ナースコールを声で押す~



QRコード


コメント 0